
STORY
The Genesis of Skycat Fuse® — Multicopter safety parachute launcher
making of — the origin of skycat
Click to open, right-lick to download as a wallpaper. Sharing and reuse is allowed, if the logo remains visible.

Henri with his 3D-printed Nokia 1020 helmet mount
Henri Hiisilä began working on a quadcopter in his garage in 2013 and unintentionally started an aerial photography business. Gradually investing in more and more expensive cameras, he started to fear losing everything in a crash, and started to look for a parachute that would be ejected in case of emergency. All he could find were clumsy, slow and heavy ejection systems, and he started to consider building his own.
But one beautiful afternoon, after dozens of successful flights and splendid pictures, he lost his quadcopter within seconds. 5 seconds to be precise, the amount of time it takes a quadopter to drop like a stone from a height of 150 meters. This may sound like a short time but it was long enough to imagine what the falling copter would do to the neighbor's kids playing in the backyard. In Henri's head those seconds felt like hours of horror and anxiety and made him understand that the parachute recovery system was actually much more important that the copter itself!
This could have been the end of a story, but it became the beginning of another. Henri decided to study in details what had happened that day and what kind of parachute recovery system would have saved the situation. He spent weeks finding and testing solutions to solve all the problems that existing recovery systems had; heavy weight, low reliability, slow triggering, safety issues, difficulties to integrate into a drone... Doing this, he ended up designing by himself the most reliable and best integrated ejection system for drones.
A year later, after hundreds of hours of prototyping, manufacturing and testing, multiple improvements, and several versions, Henri thinks he's finally come up with the right answer to make sure your copter is not hurting anyone and save your investment in case of an accident or loss of control. And it's affordable too.
To learn how Skycat evolved before public launch, go to DIYDrones.com.
Traditional copter structures are simulated against expected forces to determine installation modification impacts of frame mechanical strength. In this case impact is minimal.
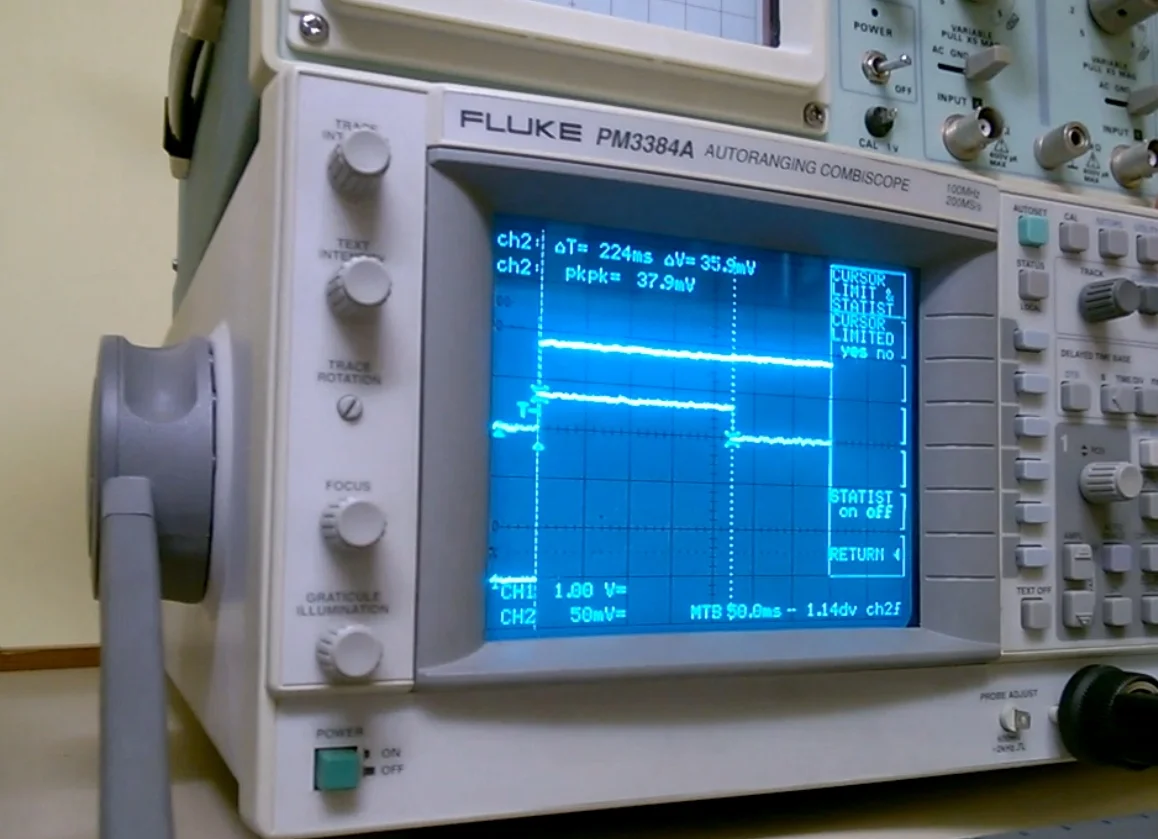
Launcher and electronics are tested throughout for normal use and also for presumable misuse. Data on screen are current - voltage curves for 3S 850mAh NanoTech 45-90C battery at rest charge state of 11.96V. Release time 224ms and current 35.9A.
SkyCat Fuse® parts are engineered, drilled and milled to perfection. Every kit is manually checked by the inventor himself before delivery. There were dozens of prototypes and hundreds of test launches before Henri was happy with the reliability.
